 Сегодняшние блоки питания совсем не те, что были ранее. Это уже не тяжелые трансформаторы с массивными сердечниками и дорогостоящей медью в обмотке. Это не те самые блоки питания которые потребляют на все 100, а греются не хуже маленького нагревателя. Сегодня это легкие и максимально эффективнее сборки ШИМ, обеспечивающие питанием практически любой наш девайс. Так что же такое ШИМ, почему она пришла на смене трансформаторам? Как она работает? Все ли в ней (ШИМ) так хорошо на все 100 процентов или остались какие-то случаи, когда лучше все же применить старый дедовский метод? Именно на эти вопросы мы ответим в нашей статье. Тем самым мы кому-то откроем глаза на принцип работы и применения ШИМ контроллеров, что уже хорошо!
Сегодняшние блоки питания совсем не те, что были ранее. Это уже не тяжелые трансформаторы с массивными сердечниками и дорогостоящей медью в обмотке. Это не те самые блоки питания которые потребляют на все 100, а греются не хуже маленького нагревателя. Сегодня это легкие и максимально эффективнее сборки ШИМ, обеспечивающие питанием практически любой наш девайс. Так что же такое ШИМ, почему она пришла на смене трансформаторам? Как она работает? Все ли в ней (ШИМ) так хорошо на все 100 процентов или остались какие-то случаи, когда лучше все же применить старый дедовский метод? Именно на эти вопросы мы ответим в нашей статье. Тем самым мы кому-то откроем глаза на принцип работы и применения ШИМ контроллеров, что уже хорошо!
Начнем мы как и полагается в классических произведениях с определений... ШИМ (широтно-импульсная модуляция) или на английском Pulse-Width Modulation—метод управления током и напряжением за счет изменения длины «рабочего» импульса к целому периоду времени, который повторяется раз за разом. Быть может наше определение не совсем ясно, так часто бывает с определениями, поэтому к ним всегда приводят примеры, про которые упомянем и мы.
Итак, как же работают старые дедушкины трансформаторы? На вторичном обмотке, за счет наведения на ней электрического поля образуемого от переменного тока в первичной обмотке и передаваемой с помощью сердечника, мы получаем электрический ток и напряжение. Теперь нам остается лишь выпрямить и стабилизировать напряжение, и дело в шляпе. Заметьте, что ток получается на выходе постоянный. При этом слово постоянный здесь наиболее точное. То есть ток не меняет своего значения он как появился, скажем 12 вольт, так и будет без изменения 12 вольт, пока мы не выдернем вилку питания из сети…
При использовании ШИМ модуляции все несколько иначе. Питание нагрузки происходит уже не всегда, не постоянно, а избирательно. То есть напряжение появляется и пропадает. При этом напряжение должно появляться лишь для того, чтобы номинально работало наше устройство, скажем светодиод или приемник. Все остальное время, необходимо чтобы напряжение не подавалось. Вы спросите как же так? Ведь если мы будем включать и отключать от сети тот же светодиод, то он начнет просто мерцать. И это действительно так, если частота включения и отключения будет заметна человеческому глазу. Однако если очень быстро включать и отключать светодиод, то человеческий глаз не сможет увидеть как мерцает свет, из-за того что наше восприятие ограничено примерно частотой для мерцания в 24 Гц. Произойдет своеобразный обман зрения. При этом если продолжать снижать время для «рабочего» импульса, то наш глаз начнет замечать некое притухание светодиода, то есть изменение его яркости свечения. Что касаемо более сложных приборов, скажем усилителей и т.д., то здесь будет эффект от от того, что полупроводниковые приборы будут работать как бы в полуоткрытом состоянии. Не открыты, не закрыты. При этом опять же частота изменения будет настолько высока, что человеческий глаз, ухо, не способны будут увидеть и услышать это. Вот и получается, что вроде как все работает как и должно, но при этом часть времени питание этих устройств не происходит. Это и есть основной смысл применения ШИМ. Ведь в этом случае все время, пока питание не подается, является временем, когда мощность не потребляется. А значит, применяя ШИМ можно реально экономить не только потребление мощности, но и уменьшить габариты устройства, за счет того, что блоки питания будут выдавать куда меньшую мощность. В итоге им придется рассеивать меньшее количество теплоты.
Теперь давайте немного о формулах и графиках. Взгляните на график и еще раз посмотрите, как реализовано питание для трансформаторного БП (U0) и для импульсного (ШИМ) U1.
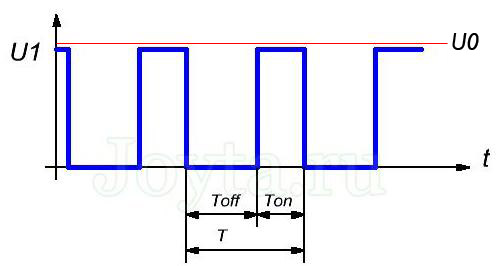
В то время, наш верный трансформатор греется и работает, ШИМ успевает отдохнуть. У него при этом есть 3 времени.
• Ton — время высокого уровня
• Toff — время низкого уровня
T — период сигнала
Само собой T=Ton+Toff.
При этом отношение времени работы к времени сигнала, будет коэффициентом. K=Ton/T.
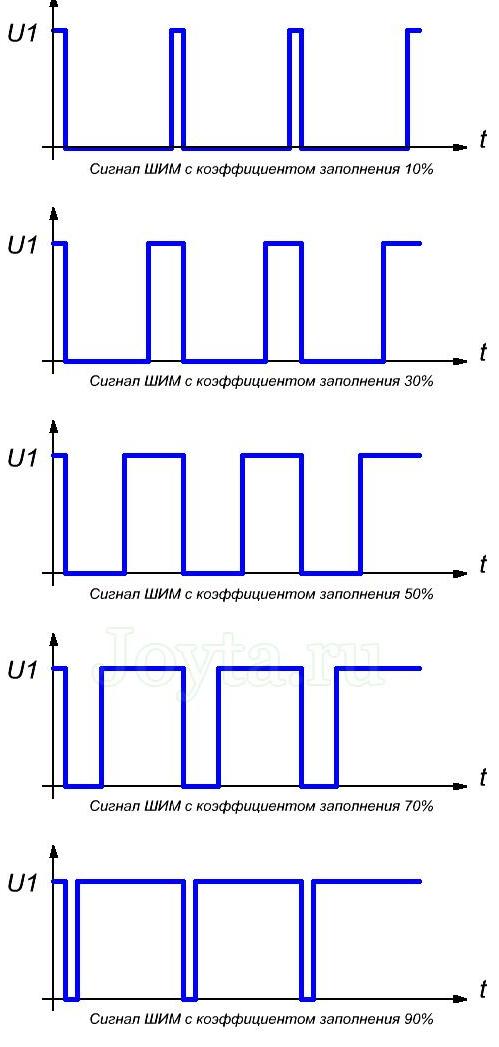
Чем ниже этот коэффициент заполнения, тем выше КПД блока питания.
Здесь также важным параметром будет частота ШИМ.
f=1/T ,
при этом измеряется она раз в секунду, то есть в герцах. Частота важна оптимальная, то есть не маленькая и не большая. Во-первых она как раз задает то самое понятие ШИМ. Ведь если частота будет 1 Гц, то это уже не ШИМ, а опять мигание. Если же это МГц, то проявление индукционных токов и невозможность так быстро открываться или закрываться полупроводниковыми приборами, также приведет к некорректной работе и потерям мощности.
Скажем так, если это световые приборы, то частота должна быть от 50 Гц. Если же это питание звуковой аппаратуры или двигателей, то выше 20 кГц, дабы не слышать ухом шумы. Отметим лишь то, что БП имеют обычно частоту 30-60 кГц.
Как сделать ШИМ блок питания (контроллер)
Как вы уже поняли, сердцем ШИМ контроллера будет мультивибратор или модулятор. Мультивибратор можно сделать даже на двух транзисторах, в виде самого рядового мультивибратора. А модулятор можно сделать на базе микроконтроллера. Чаще всего применяются именно микроконтроллеры.
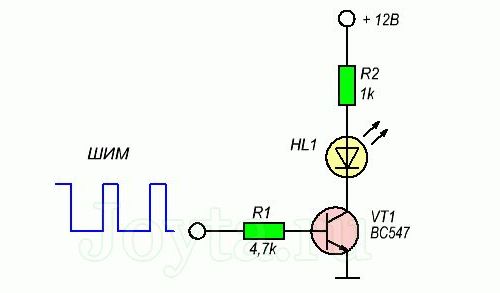
После остается лишь преобразовать низкий сигнал в управляющий силовой. Скажем с помощью транзистора. Пример для светодиода.
Если наша нагрузка имеет индуктивную составляющую, то транзистор защищается с помощью диода, который подключается параллельно нагрузке.
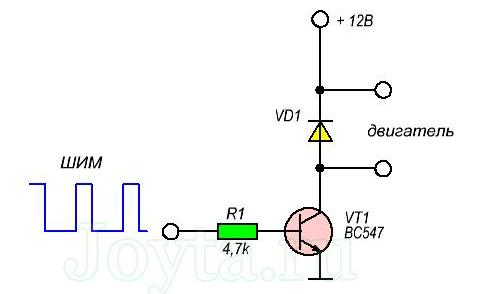
Это вроде того, как диод используется при управлении транзистором реле. В данном случае обмотка двигателя также может выдать высокий ток, который будет теперь идти не только через транзистор, но и через диод.
О конкретных примерах БП ШИМ можно узнать из статьи «Драйвер для светодиодов».
Плюсы и минусы ШИМ
Начнем с плюсов, ведь не зря же сегодня каждый второй, а то и первый БП применяет ШИМ. Как вы уже поняли, это экономично, а значит БП не будет греться! Кроме того это получится компактно по размеру и минимально по массе, при этом еще в некоторых случаях и дешевле. Еще одним важным плюсом будет более длительный режим работоспособности полупроводников. Все дело в том, что полупроводники со временем деградируют, их характеристики падают – изменяются. При этом деградация полупроводниковых переходов прямо пропорционально времени их работы. А если они часть своего времени «отдыхают», то и проработают дольше.
Теперь о минусах. ШИМ контроллеры могут давать помехи. Именно от них часто может возникать рябь на экране, либо шумы в динамике. Из-за возможных шумов их никогда не применяют для высококачественной звуковой аппаратуры. Там только «честные» трансформаторы, да и то желательно с сердечником в виде тора.
БП на ШИМ сложнее по своей схемотехнике. Неисправности в них сложнее диагностировать и находить.
Подводя итог о ШИМ
 Теперь вы и без нас сможете подвести итог. Не смотря на все нюансы и особенности ШИМ это все же хорошо и довольно просто. Мало того, что ШИМ экономит место и электроэнергию, это еще и работает!
Теперь вы и без нас сможете подвести итог. Не смотря на все нюансы и особенности ШИМ это все же хорошо и довольно просто. Мало того, что ШИМ экономит место и электроэнергию, это еще и работает!